Ray-Plane Intersection
Plane is often represented in implicit form :
Equivalent:
where $N = [A B C]^T$ and $P = [x y z]^T$
To find ray-plane intersection, substitute ray equation $P(t)$ into plane equation:
- We get $N \cdot P + D = 0$.
- Sovle for $t$ to get $t_0$.
- if $t_0$ is infinity, no intersection (ray is parallel to plane).
- Intersection point is $P(t_0)$.
- Verify that intersection is not behind ray origin.
The normal at the intersection is $N$ (or $-N$)
1 | bool Plane::hit( const Ray &r, double tmin, double tmax, SurfaceHitRecord &rec ) const |
Ray-Sphere Intersection
Sphere (centered at origin) is often represented in implicit form:
Equivalent:
To find ray-plane intersection, substitute ray equation P(t) into plane equation:
We get $P \cdot P - r^2 = 0$:
$R_o$ is ray origin, $R_d$ is ray direction.
It is a quadratic equation in the form $at^2 + bt + c = 0$
- $a = R_o \cdot R_o = 1$ (Since $|R_d| = 1$)
- $b = 2R_d \cdot R_o$
- $c = R_o \cdot R_o - r^2$
Discriminant: $d = b^2 + 4ac$
Solution: $t_\pm = \frac{-b\pm\sqrt{b^2 + 4ac}}{2a}$
Choose $t_0$ as the closest positive $t$ value ($t_+$ + or $t_-$)
The normal at the intersection point is $P(t_0)/|P(t_0)|$
Very easy to compute, that is why most ray tracing images have spheres.
1 | bool Sphere::hit( const Ray &r, double tmin, double tmax, SurfaceHitRecord &rec ) const |
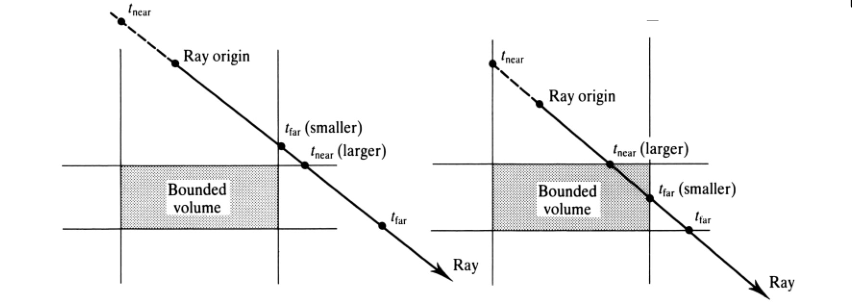
Ray-Box Intersection
To find ray-box intersection:
- For each pair of parallel plane, find the distance to the first plane ($t_{near}$) and to the second plane ($t_{far}$).
- Keep the largest $t_{near}$ so far, and smallest $t_{far}$ so far.
- If largest $t_{near}$ > smallest $t_{far}$ , no intersection.
- Otherwise, the intersection is at P(largest $t_{near}$ )
Ray-Triangle Intersection
Finding intersection between a ray and a general polygon is difficult.
- Compute ray-plane intersection
- Determine whether intersection is within polygon
- Tedious for non-convex polygon
- Interpolation of attributes at the vertices are not well-
defined
Much easier to find ray-triangle intersection
- Can use the barycentric coordinates method.
- Interpolation of attributes at the vertices are well-defined using the barycentric coordinates.
1 | bool Triangle::hit( const Ray &r, double tmin, double tmax, SurfaceHitRecord &rec ) const |
Barycentric Coordinates
The barycentric coordinates of a point P on a triangle $ABC$ is ($ \alpha $, $ \beta $, $ \gamma $) such that:
where
and
We can rewrite it as:
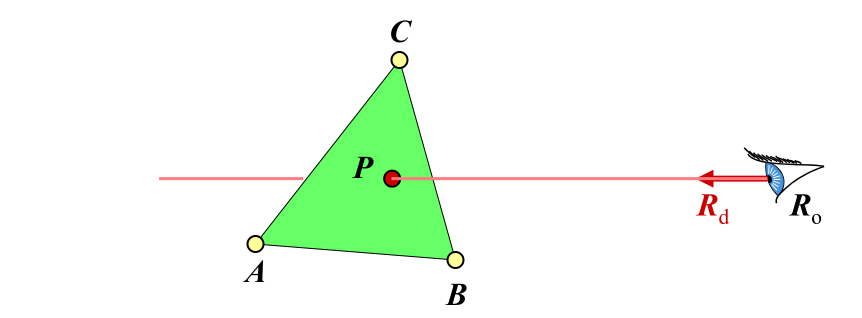
To find ray-triangle intersection, we let:
Solve for $t$, $\beta$ and $\gamma$
Intersection if $\beta + \gamma < 1$ and $\beta,\gamma > 0$ and $t > 0$
Expand &R_o + tR_d = A + \beta(B-A) + \gamma(C-A)&
we have 3 equations and 3 unknowns here.
Regroup and write in matrix form
Use Cramer’s Rule to solve for $t$, $\beta$ and $\gamma$
1 | bool Triangle::hit( const Ray &r, double tmin, double tmax, SurfaceHitRecord &rec ) const |
Advantages of Barycentric Intersection
- Efficient
- No need to store plane equation
- Barycentric coordinates are useful for linear interpolation of normal vectors, texture coordinates, and other attributes at the vertices
For example, the interpolated normal at $P$ is:
and all vector should do a normalization.
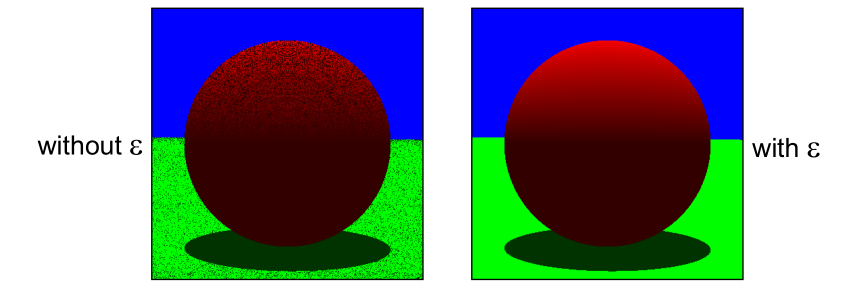
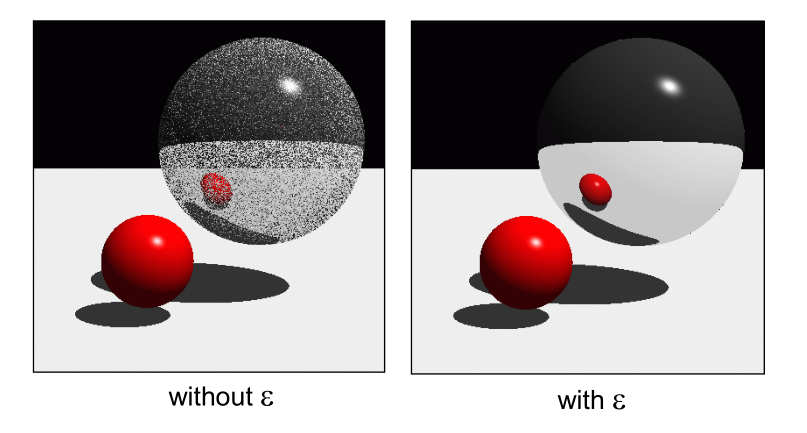
The “Epsilon” Problem
Should not accept intersection for very small positive $t$
- May falsely intersect the surface at the ray origin
- Method 1: Use an epsilon value $\varepsilon$ > 0, and accept an intersection only if its $t > \varepsilon$.
- Method 2: When a new ray is spawned, advanced the ray origin by an epsilon distance $\varepsilon$ in the ray direction